Galerkinova metoda
Galerkinova metoda (často též Ritzova-Galerkinova metoda, dle přepisu z ruštiny Galjorkinova metoda) je postup používaný při řešení soustavy parciálních diferenciálních rovnic, jehož princip spočívá v nahrazení původní rovnice, tzv. silné formulace, její integrální formou, tzv. slabým řešením, a následnou diskretizací slabého řešení. Galerkinova metoda, která patří do třídy metod vážených reziduí, se stala základem metody konečných prvků. Ve dvacátých letech 20. století ji významně rozpracovali ruští vědci, zejména Ivan Bubnov a Boris Grigorjevič Galjorkin (také přepisován Galerkin), kteří navázali na práci německého matematika Walthera Ritze. Prudký vývoj pak od padesátých let zaznamenala Metoda konečných prvků zejména díky rozmachu výpočetní techniky. V současnosti je metoda konečných prvků nejpoužívanější metodou pro numerické simulace nejrůznějších fyzikálních problémů.[1]
Slabé řešení diferenciální rovnice
Uvažujme diferenciální rovnici pro funkci na oblasti splňující homogenní Dirichletovské podmínky na hranici oblasti .




kde je lineární diferenciální operátor. Definujeme skalární součin


a pak funkce, pro něž je integrál konečný, a které splňují nulové okrajové podmínky, tvoří nekonečně-dimenzionální vektorový prostor . Existuje tedy vektorová báze a libovolnou funkci z prostoru lze vyjádřit jako lineární kombinaci bázových funkcí , přičemž platí-li pro nějakou funkci , že její skalární součin s libovolnou z bázových funkcí je nulový, pak funkce je nulovým prvkem vektorového prostoru .






To vede k definici slabého řešení , které místo původní diferenciální rovnice splňuje rovnici

Slabé řešení je tedy definováno integrální rovnicí

Existuje-li silné řešení, a je-li dostatečné hladké, pak je rovno slabému řešení.[2]
Diskretizace slabého řešení
Princip Galerkinovy metody spočívá v nahrazení nekonečně-dimenzionálního prostoru jeho konečně-dimenzionálním podprostorem . Řešení pak hledáme ve tvaru konečné řady , které splňuje slabou formulaci




čímž dostáváme soustavu lineárních rovnic pro neznámých koeficientů



Matice

se z historických důvodů nazývá maticí tuhosti a vektor

vektorem zatížení. Pro bázové funkce se používá označení testovací funkce.
Vztah slabého řešení a variačních úloh
Je-li symetrická bilineární forma, pak minimalizace funkcionálu


který je dán výrazem

je ekvivalentní hledání řešení

neboť

a tedy funkcionál nabývá minima pro , protože člen je konstantní. Pokud diferenciální rovnice popisuje fyzikální systém mající potenciální energii, vyjadřuje funkcionál energii systému.



Příklad
Řešme rovnici s homogenními okrajovými podmínkami . Rovnici přenásobíme testovací funkcí splňující okrajové podmínky a integrujeme na intervalu , dostáváme






Integrací per partes pak dále upravíme levou stranu
![{\displaystyle \left[{\frac {\mathrm {d} y}{\mathrm {d} x}}\phi \right]_{0}^{1}-\int _{0}^{1}{\frac {\mathrm {d} y}{\mathrm {d} x}}{\frac {\mathrm {d} \phi }{\mathrm {d} x}}\mathrm {d} x=\int _{0}^{1}x\phi \mathrm {d} x}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ae86cfd222dbbb01379c1d8243da701a15d3172e)
a díky tomu, že bázové funkce splňují okrajové podmínky, dostáváme slabou formulaci problému

která musí být splněna pro všechny testovací funkce.

Zvolme bázové funkce ve tvaru a řešení hledejme jako konečnou řady . Díky volbě bázových funkcí je matice tuhosti diagonální, neboť , kde je Kroneckerovo delta. Vektor zatížení je . Pro koeficienty tedy platí a hledané řešení má tedy tvar







Metoda konečných prvků
Metoda konečných prvků je zvláštním případem Galerkinovy metody, při které jsou jako testovací funkce použity funkce s kompaktním nosičem. Díky tomu je matice tuhosti řídká, v ideálním případě pásová, a při numerickém řešení soustavy rovnic lze s výhodou použít efektivní algoritmy.[3][4][5][6]
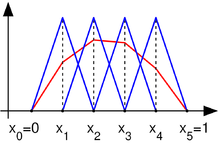
Výše uvedený příklad lze řešit metodou konečných prvků: interval rozdělme na intervalů a definujme bázové funkce


Pro jednoduchost uvažujme, že délka všech intervalů je stejná, potom matice tuhosti je diagonální


Řešení opět hledáme ve tvaru konečné řady . Jednotlivé složky vektoru zatížení lze sice v tomto jednoduchém případě řešit analyticky, ale v obecném případě je nutné použít numerickou integraci, což může platit i pro prvky matice tuhosti. V praxi se jak pro výpočet jednotlivých prvků vektorů zatížení, tak i jednotlivých prvků matice tuhosti, používají Gaussovy kvadraturní vzorce.[2]



Jedním z hlavních problémů metody konečných prvků je síťování (triangulace) oblasti, které v inženýrské praxi představuje často časově nejvíce náročnou část analýzy.[7] Dvoudimenzionální sítě jsou obvykle tvořeny trojúhelníky nebo čtyřúhelníky, zatímco třídimenzionální sítě jsou obvykle tvořeny čtyřstěny nebo šestistěny. Výsledky automatického síťování třídimenzionálních oblastí často vyžadují manuální opravy výsledné sítě a proto se automatickému generovaní sítí věnuje od 70. let minulého století velké úsilí.[8] Přesto zůstává automatické generace sítě stále nevyřešeným problémem.[7] Je-li hranice vyšetřované oblasti křivočará, je aproximace oblasti mnohostěnem (polyedrem) zdrojem dalších nepřesností metody, proto se někdy uvažují křivočaré prvky, což je však v praxi velmi obtížné.[1]
Dalším zdrojem chyb je numerická integrace použitá při výpočtu jednotlivých prvků vektoru zatížení a matice tuhosti i numerické chyby při vlastním řešení soustavy lineární rovnic s řídkou maticí, při níž se s ohledem na velikost matice často používají iterační metody (Jacobiho metoda, Gauss-Seidelova metoda aj.[5][9]).
Odhad chyby metody
Pro odhad chyby diskretizovaného řešení má klíčový význam Céaovo lemma[10] podle něhož pro funkce ze Sobolevova prostoru existuje taková konstanta , že




Norma je přitom definována pomocí skalárního součinu na prostoru


Céanovo lemma říká, že i kdybychom znali přesné řešení zkoumané diferenciální rovnice, na prostoru bychom nenalezli lepší aproximaci řešení, než je právě .


Ve výše uvedeném případě uvažujme po částech lineární funkci , která aproximuje přesné řešení ve všech uzlových bodech, tj. platí . Pro každý interval lze pomocí Taylorova rozvoje psát




,

kde je nějaký bod v intervalu . Dosadíme-li za koncový bod intervalu a odečteme-li od sebe rozvoje přesného řešení a jeho interpolaci , dostaneme





kde je nějaký bod v intervalu . Odečteme-li pak od sebe rozvoje přesného řešení a jeho interpolaci ve vnitřním bodu intervalu , dostaneme


Pro odhad chyby v normě pak platí kde je největší z intervalů . Tento výsledek má fundamentální význam pro konvergenci, neboť říká, že s jemnější diskretizací () se rozdíl přesného a diskretizovaného řešení zmenšuje. Céaovo lemma má pro a priorní odhad chyby velký význam rovněž z toho důvodu, že umožňuje místo aproximačních vlastností bázových funkcí vyšetřovat aproximační vlastnosti vektorových prostorů . Obecný odhad chyby založený na Céaově lemmatu lze pro některé speciální třídy úloh upřesnit [11]



Aplikace na fyzikální problémy
Galerkinova metoda, nejčastěji ve formě metody konečných prvků, se používá k numerickému řešení rovnice vedení tepla, rovnic popisujících gravitační, magnetický či elektrický potenciál, vlnové rovnici nebo rovnic mechaniky kontinua (např. Navierova–Stokesova rovnice). Historicky prvními úlohami, pro jejichž řešení byla použita Galerkinova metoda, byly výpočty pružnosti a pevnosti (např. vlastní kmity).
Průhyb nosníku
Klasickou úlohou je průhyb nehomogenního nosníku proměnného průřezu. Je-li nosník délky namáhaný příčným zatížením na obou stranách vetknutý, platí pro průhyb rovnice


,

kde je Youngův modul pružnosti a je kvadratický moment průřezu. Pro odvození slabého řešení definujme vektorový prostor funkcí splňujících zadané homogenní okrajové podmínky



a slabé řešení je pak definováno rovnicí

kde bilineární forma je dána předpisem

a vektor zatížení je

Ke stejné slabé formulaci bychom dospěli minimalizací funkcionálu

kde fyzikální význam prvního členu je potenciální energie vnitřních sil (energie napjatosti) a druhý člen představuje potenciální energii vnějších sil.[12] Vzhledem k tomu, že vyšetřovaná rovnice je čtvrtého řádu, je na testovací funkce kladena podmínka spojitosti prvních derivací v celém intervalu. Při rozdělení oblasti na intervalů lze jako testovací funkce použít kubické splinové funkce určené předpisem


Označíme-li délku intervalu jako , pak testovací funkce jsou dány vztahy



Zajímavou vlastností diskretizovaného řešení je, že je-li nosník homogenní a průřez nosníku konstantní, pak diskretizované řešení nemá v uzlových bodech žádnou diskretizační chybu.[2]

Stacionární vedení tepla
Stacionární vedení tepla v D-dimenzionální oblasti je popsáno rovnicí

Je-li prostředí homogenní a isotropní (tj. je jednotková matice), přechází rovnice na tzv. Poissonovou rovnici


která je významná i v teorii potenciálu. Nejčastějšími okrajovými podmínkami jsou Dirichletova homogenní podmínka , jejíž fyzikálním významem je zadaná teplota na hranici oblasti, nebo homogenní Neumannova podmínka na normálovou derivaci , resp. pro neisotropní prostředí, jejíž fyzikálním významem je nulový tepelný tok přes hranici oblasti (tj. tepelně izolovaná hranice). Přenásobením rovnice vedení tepla libovolnou testovací funkcí a použitím Greenovy formule (zobecněná integrace per partes ve více dimenzích)




dostaneme variační formulaci

Okrajové podmínky vyřešíme volbou vektorového prostoru testovacích funkcí: pro homogenní Dirichletovu podmínku zvolme

kde značí vektorový prostor funkcí, pro něž je integrál konečný, a integrál přes hranici oblasti ve slabé formulaci vymizí díky . V případě homogenní Neumannovy podmínky stačí volit vektorový prostor testovacích funkcí



a integrál přes hranici oblasti vymizí díky podmínce na nulový tepelný tok přes hranici. Díky tomu je podmínka na (normálovou) derivaci označována za přirozenou.
Slabé řešení stacionární rovnice vedení tepla je tedy

přičemž vektorový prostor je určen předepsanými okrajovými podmínkami.
Bezsíťová Galerkinova metoda
Obtíže při konstrukci výpočetních sítí vedly k rozvoji celé třídy tzv. bezsíťových metod. Tyto metody lze s výhodou uplatnit pro řešení problémů, kdy se zkoumaná oblast deformuje, např. úlohy s pohyblivou hranicí, šíření trhlin nebo simulace tavení. Typickým zástupcem bezsíťových metod je bezsíťová Galerkinova metoda,[13] při níž je konečně-prvková síť nahrazena uzlovými body, se kterými jsou asociovány váhové funkce s omezeným nosičem. Diskretizované řešení se hledá ve tvaru

kde jsou bázové funkce a jsou neznámé koeficienty závislé na poloze. V jednodimenzionálním případě s lineární bází je a bázové funkce jsou a . Koeficienty se získají minimalizací funkce







kde jsou váhové funkce asociované s uzlovými body , jejichž počet je .

Historie
Základy metody položil německý matematik Walter Ritz v práci zabývající se výpočtem vlastních kmitů pružné desky.[14][15] Pro výpočet polohy uzlových bodů, tzv. Chladniho obrazců, použil variační metodu. Ritzův přístup záhy získal velký ohlas u ruských vědců, kteří metodu zobecnili. Ruský inženýr a konstruktér ponorek Ivan Grigorjevič Bubnov rozpoznal, že slabé řešení lze definovat i pro problémy, které nemají funkcionál energie.[16] Metodu dále zobecnil Boris Grigorjevič Galjorkin, když ukázal, že podmínka ortogonality bázových funkcí není nutná.[17]
Původní Ritzovu myšlenku obohatil Richard Courant, když navrhl hledat přibližné řešení variačního problému ve tvaru spojité lineární funkce na triangulované oblasti.[18] S rozvojem výpočetní techniky pak nastal bouřlivý rozvoj metody konečných prvků, přičemž poprvé byl termín metoda konečných prvků použit v roce 1960.[19]
Přestože k numerickému řešení diferenciálních rovnic se metoda konečných prvků (MKP) používala zejména v leteckém průmyslu již od padesátých let,[20][21] teoretické studium MKP začalo až v polovině šedesátých let, kdy brněnský matematik Miloš Zlámal jako první dokázal konvergenci MKP [22] a stal se tak světově uznávaným odborníkem.[23]
Odkazy
Reference
- ↑ a b M. Křížek. Padesát let metody konečných prvků. Pokroky matematiky, fyziky a astronomie, vol. 37 (1992), issue 3, pp. 129-140 dostupné online
- ↑ a b c M. Křížek, P. Neittaanmaki, Finite Element Approximation of Variational Problems and Applications, Longman New York, 1990, ISBN 0-582-05666-7
- ↑ A. A. Samarskij, J. S. Nikolajev.: Numerické řešení velkých řídkých soustav. Academia, Praha, 1984.
- ↑ M. Fiedler: Speciální matice a jejich použití v numerické matematice. SNTL, Praha, 1981.
- ↑ a b Y. Saad. Iterative methods for sparse linear systems. Second edition with corrections. 2000.
- ↑ G. Meurant. Computer Solution of Large Linear Systems, North Holland, Elsevier, Amsterdam, 1999.
- ↑ a b O. C. Zienkiewicz, R. L. Taylor, J. Z. Zhu. The finite element method: its basis and fundamentals. 6. vydání, McGraw-Hill 2005. ISBN 0-7506-6320-0
- ↑ J. E. Thompson, Z. U. A. Warsi, C. W. Mastin. Numerical Grid Generation: Foundations and Applications, Elsevier Science Publishing, 1985 dostupné online Archivováno 13. 8. 2011 na Wayback Machine.
- ↑ J. Prokop. Algoritmy v jazyku C a C++: praktický průvodce. Grada, Praha 2009
- ↑ J. Céa. Approximation variationnelle des problèmes aux limites (dizertační práce). Annales de l'institut Fourier 14. 2. pp. 345–444. 1964. dostupné online
- ↑ W. Chen, M. Křížek. What is the smallest possible constant in Céa's lemma? Applications of Mathematics, 51(2), pp. 129-144, 2006. dostupné on-line
- ↑ J. Lenert. Úvod do metody konečných prvků. VŠB-TU Ostrava, 1999. ISBN 80-7078-686-8
- ↑ T. Belytschko, Z. Z. Lu, L. Gu. Element free Galerkin methods. Int. J. Numerical Methods in Engineering, 37, 229-256, 1994. dostupné online[nedostupný zdroj]
- ↑ W. Ritz. Über eine neue Methode zur Lösung gewisser Variationsprobleme der mathematischen Physik. J. für die reine und angewandte Mathematik, 135:1–61, 1908.
- ↑ W. Ritz. Theorie der Transversalschwingungen einer quadratischen Platte mit freien Rändern. Annalen der Physik, 18(4):737–807, 1909.
- ↑ I. G. Bubnov. Strojitelnaja mechanika korabja, technická zpráva, 2. část. St. Petersburg, 1914.
- ↑ B. G. Galerkin, Steržni i plastinki: Riady v někotorych voprosach uprugovo ravnovesija steržnej i plastinok. Věstnik inžheněrov, 19(1):897-908, 1915.
- ↑ Richard Courant. Variational methods for the solution of problems of equilibrium and vibrations. Bulletin of the American Math Society, 49:1–61, 1943 dostupné online
- ↑ R. W. Clough. The Finite Element Method in Plane Stress Analysis, Proceedings of 2nd ASCE Conference on Electronic Computation, Pittsburgh, PA, September 8–9, 1960.
- ↑ J. H. Argyris. Energy theorems and structural analysis, Part l, Aircraft Eng., 26, 383, 1954.
- ↑ M. J. Turner, R. W. Clough, H. C. Martin, L. T. Topp. Stiffness and deflection analysis of complex structures. J.Aeronaut. Sci, 25, 805-823, 1956.
- ↑ M. Zlámal. On the finite element method. Numer. Math. 12, 394-409, 1968.
- ↑ M. Ráb. K šedesátinám profesora Miloše Zlámala. Časopis pro pěstování matematiky, 109, 436-441, 1984. dostupné online
Literatura
Česky
- I. Babuška, M. Práger, E. Vitásek: Numerické řešení diferenciálních rovnic, SNTL Praha, 1964.
- Z. Bittnar, P. Řeřicha. Metoda konečných prvků v dynamice konstrukcí, SNTL Praha, 1981.
- J. Haslinger. Metoda konečných prvků pro řešení eliptických rovnic a nerovnic. Skripta MFF UK, SPN Praha, 1980.
- V. Kolář, J. Kratochvíl, F. Leitner, A. Ženíšek. Výpočet plošných a prostorových konstrukcí metodou konečných prvků. SNTL, Praha 1979.
- V. Kolář, I. Němec, V. Kanický. FEM – principy a praxe metody konečných prvků. Computer Press, Praha, 1997.
- K. Rektorys. Variační metody v inženýrských problémech a v problémech matematické fyziky, Academia, Praha, 1999.
- E. Vitásek. Numerické metody, SNTL, Praha, 1987.
Anglicky
- I. Babuška, T. Strouboulis: The finite element method and its reliability, Oxford University Press, New York, 2001.
- S. C. Brenner, L. Ridgway Scott. The mathematical theory of finite element methods, New York, Springer 1994. ISBN 0-8493-1668-5
- K. K. Gupta, J. L. Meek. A Brief History of the Beginning of the Finite Element Method, Int. J. for Num. Methods in Engineering, 39, 3761-3774, 1996. dostupné online[nedostupný zdroj]
- K. H. Huebner, D. L. Dewhirst, D. E. Smith, T. G. Byrom. The Finite Element Method For Engineers, John Wiley, 2001. ISBN 0-471-37078-9
- P. Šolín. Partial Differential Equations and the Finite Element Method, J. Wiley and Sons, 2005. ISBN 0-4717-2070-4
- R L. Taylor. Ritz and Galerkin: the road to the Finite Element Method. Bulletin for the international association for computational Mechanics, 12:2–5, 2002. dostupné online Archivováno 4. 7. 2011 na Wayback Machine.
- L. T. Tenek, J. H. Argyris. Finite element analysis for composite structures. Springer 1998. ISBN 978-0-7923-4899-3
- O. C. Zienkiewicz. The Finite Element Method in Engineering Science. McGraw Hill, London, 1971.
Portály: Matematika







